My Research
Probabilistic fault detection, identification, and quantification on a multirotor aircraft
I am working in fault detection and identification in multicopters, which has been identified as potential platform for Urban Air Mobility due to their rotor redundancy, design flexibility, ability to integrate distributed electric propulsion and their superior fault robustness and compensation capabilities compared to the traditional helicopter. The problem at hand is to deduce the health condition of a hexacopter flying under varying operating conditions and environmental disturbances with aircraft attitude and controller command signals only. The aircraft is equipped with fault tolerant control which makes the fault identification even more challenging with the fault compensated attitude signals. The other challenges lies in generalization capability of the stochastic framework to account for any operating conditions within the operating regime with limited training data and robustness against atmospheric turbulence and wind gusts. The rotor fault information obtained in real-time can be critical for optimal control reallocation or vehicle reconfiguration to complete flight. safely in an event of rotor failure.

Global 'Stochastic' Models under varying operating conditions
The cornerstone of the proposed framework lies on the identification of stochastic Vector Functionally Pooled models that can accurately represent the healthy and various rotor failure dynamics of a hexacopter under varying forward velocity and gross weight configurations. These models can subsequently enable online fault detection and identification via statistical decision making schemes based on residual properties under predetermined confidence levels (type I and II error probabilities, i.e., false alarm and missed faults).
A proof-of-concept application to aircraft flight for healthy and faulty states under severe turbulence and few different operating conditions and the effectiveness of all the proposed residual-based time series methods in terms of prompt rotor fault detection, and classifying failures from post-failure controller compensated signals have been demonstrated in following paper.
Time-series Assisted Neural Network
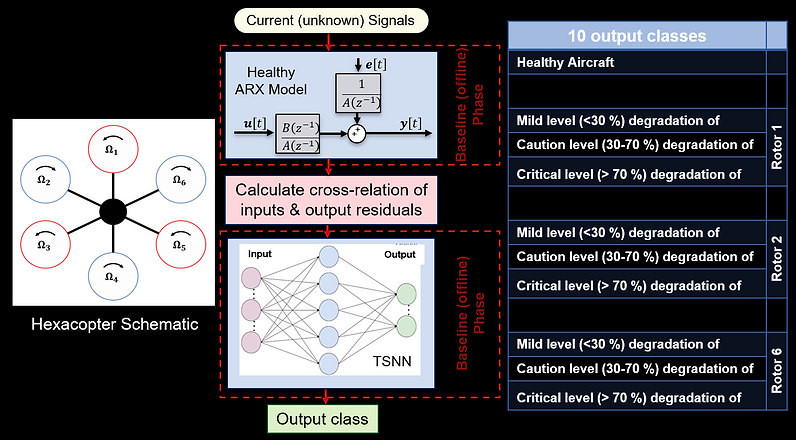
In this study, an online real- time rotor FDI technique, robust in the presence of air turbulence and able to distinguish between aircraft response mimicking rotor faults due to wind gusts and actual rotor degradation, has been developed. The major accomplishment of this study has been the formulation of a powerful feature that can differentiate between the gust- affected healthy aircraft dynamics and rotor degradation dynamics even after it is compensated by the controller. A statistical time series model for healthy aircraft using the aircraft attitudes as the output and controller commands as the input has been utilized to extract this feature, the cross-correlation between inputs and signal residuals. When used as input to a single hidden layer neural network, it results in fast rotor FDI in a hexacopter with fault classification accuracy of > 95%, sensitivity to even 10 % rotor degradation and capability to reject gusts.
The details are given in the following paper.

Sensor Fusion within a Probabilistic Framework
The current flight state can be sensed by minimizing the measure of fit of the current unknown signals with the help of the identified stochastic model accounting for different flight states. Subsequently, the sensor readings can be statistically compared to the estimated states, and residual based decision making algorithms can be developed. This work is at an early stage, where an appropriate data generation scheme to procure heterogeneous multi-model sensor data is being developed. The goal is to build a machine learning framework for situation assessment and cost-effectively augment the reliability of the aircraft without an considerable increase in the number of sensors.
Past Projects
My research endeavors have always been to built a viable product at the end. Learn more about my past research projects below.

Sathi Walker
December 2017- May 2018
Building upon work done by former lab members, I revised the design based on field trials of ‘Sathi Walker’, a low-cost, self-propelled mobility device for assisting children with locomotor disability to walk safely. The objective was to make a children friendly design, to be used in schools and home alike, providing stability to minimize caretaker effort and instill confidence and happiness of self-dependent mobility. Features like chair for sitting when the child is tired, desk to write and draw upon, adjustments to accommodate growth of the child and folding to ensure portability were incorporated.
Rural Technology
August 2017- November 2017
Improve ergonomics and efficiency of rural technologies like feet-operated Charkha, Holy Basil bead making device, sheep hair shearing device etc. by cost effective design changes to increase the productivity of marginal artisans of rural India. This tenure also gave me the opportunity of several field visits to interact with the local artisans to investigate their current working conditions. The challenge was to identify the scope of improvement through extensive field survey and formulate it into a design problem.

Solar-operated Treadle Pump
May 2016-June 2017
Multibody dynamic model of feet-operated treadle pump considering the flexibility of links, and friction and clearances in joints was developed to study the force and energy expended to lift groundwater for irrigation purposes. Next, I performed design, dynamic analysis, fabrication and testing of a Solar-powered Treadle pump so as to minimize drudgery, and wear rate associated with manually driven treadle pump. Contrary to the fact that manual operation can be done not for more than 40 min owing to the fatigue of leg muscles, this can be used for 4−6 h daily or more depending on the hours of peak sunshine with zero operating costs and only nominal maintenance cost.
Treadmill Cellphone Charger
January 2013 - May 2013
An average human being can produce up-to 200 W of power while running on the treadmill for short periods and power needed to charge a mobile phone typically ranges from 3-7 W. The aim is to extract this miniscule fraction of total power generated to drive a friction drive, ensuring no significant change in load is experienced by the user. This friction drive generates power by driving a DC motor. A simple circuitry enables charging mobile phones at a constant voltage to prevent any battery damage.
